Info
本文为《通信原理》的读书笔记,对应《通信原理》(第七版)by 樊昌信的第九章,主要介绍数字信号的最佳接收,包括最佳接受准则、匹配滤波器等,关于通信原理的重点章节已经完成,这篇暂且是《通信原理》的最后一章笔记,接下来按读书计划为Digital communications 5th by John G. Proakis
1. 数字信号的最佳接收
对于M M M r ( t ) = s ( t ) + n ( t ) r(t)=s(t)+n(t) r ( t ) = s ( t ) + n ( t ) s i ( t ) s_i(t) s i ( t )
f i ( r ) = 1 ( 2 π σ n ) k e x p { − 1 n 0 ∫ 0 T B [ r ( t ) − s i ( t ) ] 2 d t } f_i(r)=\frac1{(\sqrt{2\pi}\sigma_n)^k}\mathrm{exp}\Big\{-\frac1{n_0}\int_0^{T_B}\Big[r(t)-s_i(t)\Big]^2\mathrm{d}t\Big\}
f i ( r ) = ( 2 π σ n ) k 1 exp { − n 0 1 ∫ 0 T B [ r ( t ) − s i ( t ) ] 2 d t }
数字通信系统的总误码率为:
P e = P ( 1 ) P e 1 + P ( 0 ) P e 0 = P ( 1 ) ∫ A 0 f 1 ( r ) d r + P ( 0 ) ∫ A 1 f 0 ( r ) d r \begin{aligned}
P_{\mathrm{e}}&=P(1)P_{\mathrm{e}1}+P(0)P_{\mathrm{e}0}\\
&=P(1)\int_{A_0}f_1(r)\mathrm{d}r+P(0)\int_{A_1}f_0(r)\mathrm{d}r
\end{aligned}
P e = P ( 1 ) P e 1 + P ( 0 ) P e 0 = P ( 1 ) ∫ A 0 f 1 ( r ) d r + P ( 0 ) ∫ A 1 f 0 ( r ) d r
假设系统为简单的二进制传输数字系统,则:
P e = P ( 1 ) ∫ − ∞ r 0 ′ f 1 ( r ) d r + P ( 0 ) ∫ r 0 ′ ∞ f 0 ( r ) d r P_e=P(1)\int_{-\infty}^{r_0^{\prime}}f_1(r)\mathrm{d}r+P(0)\int_{r_0^{\prime}}^{\infty}f_0(r)\mathrm{d}r
P e = P ( 1 ) ∫ − ∞ r 0 ′ f 1 ( r ) d r + P ( 0 ) ∫ r 0 ′ ∞ f 0 ( r ) d r
令偏导数为零可得,最佳的判决分界点:
P ( 1 ) P ( 0 ) = f 0 ( r 0 ) f 1 ( r 0 ) \frac{P(1)}{P(0)}=\frac{f_0(r_0)}{f_1(r_0)}
P ( 0 ) P ( 1 ) = f 1 ( r 0 ) f 0 ( r 0 )
2. 确知信号最佳接收机
2.1. 确知信号最佳接受准则
之前提到加噪后接收码元的的概率密度表达形式代入接受准则,可得:
n 0 ln 1 P ( 1 ) + ∫ 0 T B [ r ( t ) − s 1 ( t ) ] 2 d t > n 0 ln 1 P ( 0 ) + ∫ 0 T B [ r ( t ) − s 0 ( t ) ] 2 d t n_{0}\ln\frac{1}{P(1)} + \int_{0}^{T_{\mathrm{B}}} \left[r(t) - s_{1}(t)\right]^{2} \, \mathrm{d}t > n_{0}\ln\frac{1}{P(0)} + \int_{0}^{T_{\mathrm{B}}} \left[r(t) - s_{0}(t)\right]^{2} \, \mathrm{d}t
n 0 ln P ( 1 ) 1 + ∫ 0 T B [ r ( t ) − s 1 ( t ) ] 2 d t > n 0 ln P ( 0 ) 1 + ∫ 0 T B [ r ( t ) − s 0 ( t ) ] 2 d t
假设波形的能量相同∫ 0 T B s 0 2 ( t ) d t = ∫ 0 T B s 1 2 ( t ) d t \int_0^{T_B}s_0^2\left(t\right)\mathrm{d}t=\int_0^{T_B}s_1^2\left(t\right)\mathrm{d}t ∫ 0 T B s 0 2 ( t ) d t = ∫ 0 T B s 1 2 ( t ) d t
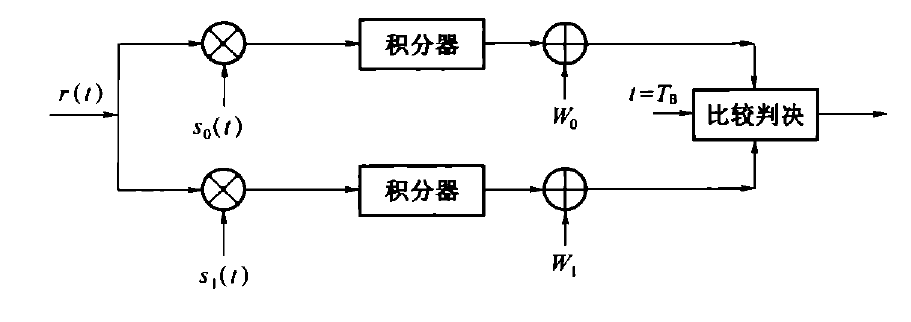
W 1 + ∫ 0 T B r ( t ) s 1 ( t ) d t < W 0 + ∫ 0 T B r ( t ) s 0 ( t ) d t W_1+\int_0^{T_B}r(t)s_1(t)\mathrm{d}t<W_0+\int_0^{T_B}r(t)s_0(t)\mathrm{d}t
W 1 + ∫ 0 T B r ( t ) s 1 ( t ) d t < W 0 + ∫ 0 T B r ( t ) s 0 ( t ) d t
式子中,W 0 = n 0 2 l n P ( 0 ) W_0 = \dfrac{n_0}{2}\mathrm{ln}P(0) W 0 = 2 n 0 ln P ( 0 ) W 1 = n 0 2 l n P ( 1 ) W_1= \dfrac{n_0}{2}\mathrm{ln}P(1) W 1 = 2 n 0 ln P ( 1 )
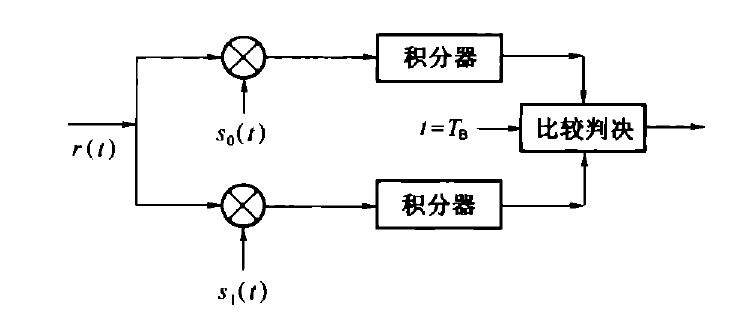
若先验概率P ( 1 ) = P ( 0 ) = 0.5 P(1)=P(0)=0.5 P ( 1 ) = P ( 0 ) = 0.5
∫ 0 T B r ( t ) s 1 ( t ) d t < ∫ 0 T B r ( t ) s 0 ( t ) d t \int_0^{T_B}r(t)s_1(t)\mathrm{d}t<\int_0^{T_B}r(t)s_0(t)\mathrm{d}t
∫ 0 T B r ( t ) s 1 ( t ) d t < ∫ 0 T B r ( t ) s 0 ( t ) d t
此时系统框图不需要先验概率的加权:
2.2. 确知信号最佳接受的误码率
在先验概率相等的情况下,这里省去证明,二进制确知信号的最佳接收机的误码率为:
P e = 1 2 π ∫ A ∞ exp ( − x 2 2 ) d x = 1 2 e r f c ( A 2 ) P_{\mathrm{e}}=\frac{1}{\sqrt{2\pi}}\int_{A}^{\infty}\exp\Bigl(-\frac{x^{2}}{2}\Bigr) \mathrm{d}x=\frac{1}{2}\mathrm{erfc}\Bigl(\frac{A}{\sqrt{2}}\Bigr) P e = 2 π 1 ∫ A ∞ exp ( − 2 x 2 ) d x = 2 1 erfc ( 2 A )
其中,A = 1 2 n 0 ∫ 0 T B [ s 0 ( t ) − s 1 ( t ) ] 2 d t A=\sqrt{\frac{1}{2n_{0}}\int_{0}^{T_{\mathrm{B}}}[s_{0}(t)-s_{1}(t)]^{2}\mathrm{d}t} A = 2 n 0 1 ∫ 0 T B [ s 0 ( t ) − s 1 ( t ) ] 2 d t
上式表明,误码率与信号能量之差[ s 0 ( t ) − s 1 ( t ) ] 2 [s_{0}(t)-s_{1}(t)]^{2} [ s 0 ( t ) − s 1 ( t ) ] 2 A A A
为此引入形容波形间的互相关系数:
ρ = ∫ 0 T B s 0 ( t ) s 1 ( t ) d t E 0 E 1 \rho=\frac{\int_0^{T_\mathrm{B}}s_0\left(t\right)s_1\left(t\right)\mathrm{d}t}{\sqrt{E_0E_1}}
ρ = E 0 E 1 ∫ 0 T B s 0 ( t ) s 1 ( t ) d t
其中,E 0 = ∫ 0 T B s 0 2 ( t ) d t E_0=\int_0^{T_\mathrm{B}}s_0^2\left(t\right)\mathrm{d}t E 0 = ∫ 0 T B s 0 2 ( t ) d t E 1 = ∫ 0 T B s 1 2 ( t ) d t E_1=\int_0^{T_\mathrm{B}}s_1^2\left(t\right)\mathrm{d}t E 1 = ∫ 0 T B s 1 2 ( t ) d t E 0 = E 1 = E b E_0=E_1=E_b E 0 = E 1 = E b
P e = 1 2 e r f c [ E b ( 1 − ρ ) 2 n 0 ] P_{\mathrm{e}}=\frac{1}{2}\mathrm{erfc}\biggl[\sqrt{\frac{E_{\mathrm{b}}(1-\rho)}{2n_{0}}}\biggr]
P e = 2 1 erfc [ 2 n 0 E b ( 1 − ρ ) ]
对于二进制数字信号系统:
当ρ = 1 \rho=1 ρ = 1 P e = 1 2 P_{\mathrm{e}}=\dfrac 12 P e = 2 1
当ρ = 0 \rho=0 ρ = 0 P e = 1 2 e r f c ( E b 2 n 0 ) P_{\mathrm{e}}=\dfrac 12\mathrm{erfc}\biggl(\sqrt{\dfrac{E_{\mathrm{b}}}{2n_{0}}}\biggr) P e = 2 1 erfc ( 2 n 0 E b )
当ρ = − 1 \rho=-1 ρ = − 1 P e = 1 2 e r f c ( E b n 0 ) P_{\mathrm{e}}=\dfrac 12\mathrm{erfc}\biggl(\sqrt{\dfrac{E_{\mathrm{b}}}{n_{0}}}\biggr) P e = 2 1 erfc ( n 0 E b )
误码率仅和E b / n 0 E_b/n_0 E b / n 0 ρ \rho ρ E b E_b E b n 0 n_0 n 0 1 / T B 1/T_B 1/ T B
E b n 0 = P s T B n 0 = P s n 0 ( 1 / T B ) = P s n 0 B = P s P n \frac{E_\mathrm{b}}{n_0}=\frac{P_\mathrm{s}T_\mathrm{B}}{n_0}=\frac{P_\mathrm{s}}{n_0(1/T_\mathrm{B})}=\frac{P_\mathrm{s}}{n_0B}=\frac{P_\mathrm{s}}{P_\mathrm{n}}
n 0 E b = n 0 P s T B = n 0 ( 1/ T B ) P s = n 0 B P s = P n P s
实际上的通信系统,并不能满足E b n 0 \dfrac{E_\mathrm{b}}{n_0} n 0 E b
3. 匹配滤波接收
上边讲述了将错误概率最小作为的最佳接受准则,其中误码率和信噪比相关,而匹配滤波器是一种能在特定时刻获得最大输出信噪比的最佳线性滤波器。
设接受滤波器的系统函数为H ( f ) H(f) H ( f ) s ( t ) s(t) s ( t ) T B T_B T B
r ( t ) = s ( t ) + n ( t ) 0 ≤ t ≤ T B r(t)=s(t)+n(t)\quad 0\leq t\leq T_{\mathrm{B}}
r ( t ) = s ( t ) + n ( t ) 0 ≤ t ≤ T B
根据随机信号输入系统的功率谱密度,易得在抽样时刻t 0 t_0 t 0
r 0 = ∣ s o y ( t 0 ) ∣ 2 N 0 = ∣ ∫ − ∞ ∞ H ( f ) S ( f ) e j 2 π f t 0 d f ∣ 2 n 0 2 ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f r_0=\frac{|s_{\mathrm{oy}}(t_0)|^2}{N_0}=\frac{\left|\int_{-\infty}^\infty H(f)S(f)\mathrm{e}^{\mathrm{j}2\pi ft_0}\mathrm{d}f\right|^2}{\frac{n_0}2\int_{-\infty}^\infty|H(f)|^2\mathrm{d}f}
r 0 = N 0 ∣ s oy ( t 0 ) ∣ 2 = 2 n 0 ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f ∫ − ∞ ∞ H ( f ) S ( f ) e j 2 π f t 0 d f 2
由施瓦兹不等式可得:
r 0 ≤ ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f n 0 2 ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f = ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f n 0 2 = 2 E n 0 r_{0}\leq\frac{\int_{-\infty}^{\infty}|H(f)|^{2}\mathrm{d}f\int_{-\infty}^{\infty}|S(f)|^{2}\mathrm{d}f}{\frac{n_{0}}{2}\int_{-\infty}^{\infty}|H(f)|^{2}\mathrm{d}f}=\frac{\int_{-\infty}^{\infty}|S(f)|^{2}\mathrm{d}f}{\frac{n_{0}}{2}}=\frac{2E}{n_{0}}
r 0 ≤ 2 n 0 ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f ∫ − ∞ ∞ ∣ H ( f ) ∣ 2 d f ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f = 2 n 0 ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f = n 0 2 E
其中E = ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f E=\int_{-\infty}^{\infty}|S(f)|^{2}\mathrm{d}f E = ∫ − ∞ ∞ ∣ S ( f ) ∣ 2 d f H ( f ) = k S ∗ ( f ) e − j 2 π f t 0 H(f)=kS^*\left(f\right)\mathrm{e}^{-\mathrm{j}2\pi ft_0} H ( f ) = k S ∗ ( f ) e − j 2 π f t 0 2 E / n 0 2E/n_0 2 E / n 0
匹配滤波器的时域形式:
h ( t ) = ∫ − ∞ ∞ H ( f ) e j 2 π f t d f = ∫ − ∞ ∞ k S ∗ ( f ) e − j 2 π f i 0 e j 2 π f t d f = k ∫ − ∞ ∞ [ ∫ − ∞ ∞ s ( τ ) e − j 2 π f τ d τ ] ∗ e − j 2 π f ( t 0 − t ) d f = k ∫ − ∞ ∞ [ ∫ − ∞ ∞ e j 2 π f ( τ − t 0 + t ) d f ] s ( τ ) d τ = k ∫ − ∞ ∞ s ( τ ) δ ( τ − t 0 + t ) d τ = k s ( t 0 − t ) \begin{aligned}
h(t)& =\int_{-\infty}^{\infty}H(f) \mathrm{e}^{\mathrm{j}2\pi ft} \mathrm{d}f = \int_{-\infty}^{\infty}kS^*\left(f\right)\mathrm{e}^{-\mathrm{j}2\pi fi_{0}}\mathrm{e}^{\mathrm{j}2\pi ft}\mathrm{d}f \\
&=k\int_{-\infty}^{\infty}\left[\int_{-\infty}^{\infty}s(\tau)\mathrm{e}^{-\mathrm{j}2\pi f\tau}\mathrm{d}\tau\right]^*\mathrm{e}^{-\mathrm{j}2\pi f(t_0-t)}\mathrm{d}f \\
&=k\int_{-\infty}^\infty\left[\int_{-\infty}^\infty\mathrm{e}^{j2\pi f(\tau-t_0+t)}\mathrm{d}f\right]s\left(\tau\right)\mathrm{d}\tau \\
&=k\int_{-\infty}^\infty s(\tau)\delta(\tau-t_0+t)\mathrm{d}\tau=ks(t_0-t)
\end{aligned}
h ( t ) = ∫ − ∞ ∞ H ( f ) e j 2 π f t d f = ∫ − ∞ ∞ k S ∗ ( f ) e − j 2 π f i 0 e j 2 π f t d f = k ∫ − ∞ ∞ [ ∫ − ∞ ∞ s ( τ ) e − j 2 π f τ d τ ] ∗ e − j 2 π f ( t 0 − t ) d f = k ∫ − ∞ ∞ [ ∫ − ∞ ∞ e j 2 π f ( τ − t 0 + t ) d f ] s ( τ ) d τ = k ∫ − ∞ ∞ s ( τ ) δ ( τ − t 0 + t ) d τ = k s ( t 0 − t )
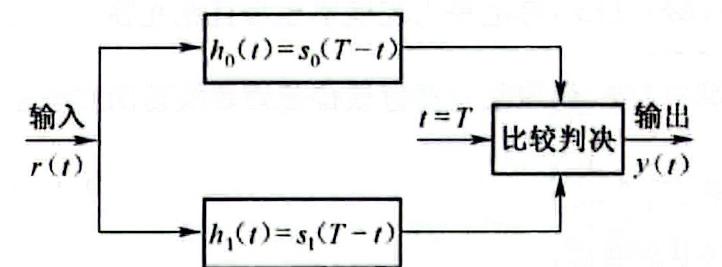
可见,h ( t ) h(t) h ( t ) s ( t ) s(t) s ( t ) s ( − t ) s(-t) s ( − t ) t 0 t_0 t 0
对于物理可实现的匹配滤波器,应有s ( t ) = 0 , t > t 0 s(t)=0,\quad t>t_{0} s ( t ) = 0 , t > t 0 s ( t ) s(t) s ( t ) t 0 t_0 t 0 s ( t ) s(t) s ( t ) T T T t o ≥ T t_o\geq T t o ≥ T t 0 = T t_0=T t 0 = T
对于二进制数字传输系统,使用匹配滤波器的最佳接收机框图:
4. 最佳基带传输系统
最佳接收机只是接收系统的最佳化,而不是整个通信系统的最佳化。而数字基带传输系统最佳化的设计目标是:无码间串扰且误码率最小。
H ( w ) = G T ( w ) C ( w ) G R ( w ) H(w) = G_T(w)C(w)G_R(w)
H ( w ) = G T ( w ) C ( w ) G R ( w )
为消除码间串扰,我们只考虑了信号传输函数,没有考虑信道的加性噪声。需要考虑既满足消除码间串扰,同时误码率最小的系统,这样的基带传输系统称为最佳基带传输系统。
4.1. 理想信道的最佳基带传输系统
理想信道指的是信号传输函数C ( ω ) = 1 C(\omega)=1 C ( ω ) = 1
G T ( ω ) = G R ( ω ) = H 1 / 2 ( ω ) G_{\mathrm{T}}(\omega)=G_{\mathrm{R}}(\omega)=H^{1/2}(\omega)
G T ( ω ) = G R ( ω ) = H 1/2 ( ω )
则可得到一个既能消除码间串扰,同时又有最好的抗噪声性能的最佳基带系统。
4.2. 非理想信道的最佳基带传输系统
此时接受机得到的码元频谱为G T ( f ) ⋅ C ( f ) G_T(f)\cdot C(f) G T ( f ) ⋅ C ( f )
G R ′ ( f ) = G T ⋆ ( f ) ⋅ C ⋆ ( f ) G_{\mathrm{R}}^{\prime}(f)=G_{\mathrm{T}}^{\star}(f)\cdot C^{\star}(f)
G R ′ ( f ) = G T ⋆ ( f ) ⋅ C ⋆ ( f )
这时,基带传输系统的总传输特性为:
H ( f ) = G T ( f ) ⋅ C ( f ) ⋅ G R ′ ( f ) = G T ( f ) ⋅ C ( f ) ⋅ G T ∗ ( f ) ⋅ C ∗ ( f ) = ∣ G T ( f ) ∣ 2 ∣ C ( f ) ∣ 2 \begin{aligned}
H(f) &= G_{\mathrm{T}}(f) \cdot C(f) \cdot G_{\mathrm{R}}^{\prime}(f) \\
&= G_{\mathrm{T}}(f) \cdot C(f) \cdot G_{\mathrm{T}}^{*}(f) \cdot C^{*}(f) \\
&= \left| G_{\mathrm{T}}(f) \right|^{2} \left| C(f) \right|^{2}
\end{aligned}
H ( f ) = G T ( f ) ⋅ C ( f ) ⋅ G R ′ ( f ) = G T ( f ) ⋅ C ( f ) ⋅ G T ∗ ( f ) ⋅ C ∗ ( f ) = ∣ G T ( f ) ∣ 2 ∣ C ( f ) ∣ 2
为了消除码间串扰,由第6章的讨论得知,H ( f ) H(f) H ( f )
∑ i H ( ω + 2 π i T B ) = T B ∣ ω ∣ ⩽ π T B \sum_iH\left(\omega+\frac{2\pi i}{T_B}\right)=T_B\quad|\omega|\leqslant\frac{\pi}{T_B}
i ∑ H ( ω + T B 2 πi ) = T B ∣ ω ∣ ⩽ T B π
因此还需要增加均衡滤波器T ( f ) T(f) T ( f )
T ( ω ) = T B ∑ i ∣ G T ( ω + 2 π i T B ) ∣ 2 ∣ C ( ω + 2 π i T B ) ∣ 2 ∣ ω ∣ ⩽ π T B T(\omega)=\frac{T_{\mathrm{B}}}{\sum_{i} \left|G_{\mathrm{T}}(\omega+\frac{2\pi i}{T_{\mathrm{B}}})\right|^{2} \left|C(\omega+\frac{2\pi i}{T_{\mathrm{B}}})\right|^{2}}\quad| \omega|\leqslant\frac{\pi}{T_{\mathrm{B}}}
T ( ω ) = ∑ i G T ( ω + T B 2 πi ) 2 C ( ω + T B 2 πi ) 2 T B ∣ ω ∣ ⩽ T B π